Design Processes 2008-2009
Automatic Can Crusher Project

Click here to view a video of the Can Crusher
(Requires Quicktime)

The class used the Vernier Lappro & DCU to send the data to 12 volt DC motors and a 12 volt electronic control valve.
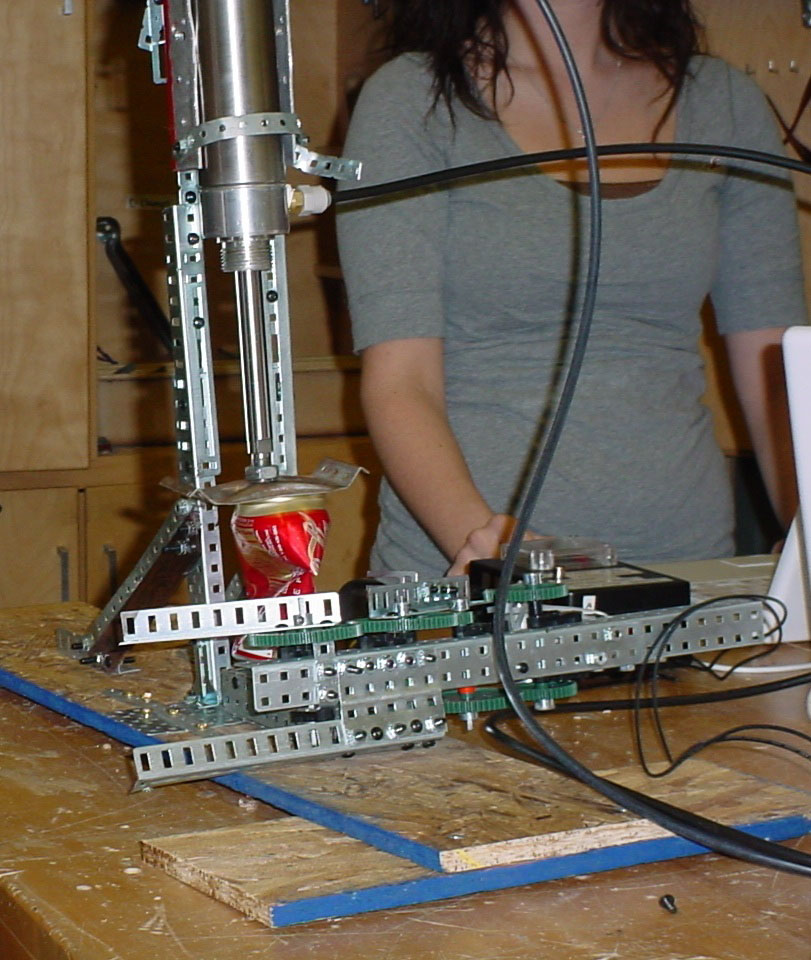
The crushing power came from a 2 inch double acting pneumatic cylinder capable of 200 lbs of force at 65 psi.

The students programmed the cycle times using REAL Software's REALBasic language on an Apple iBook G4.
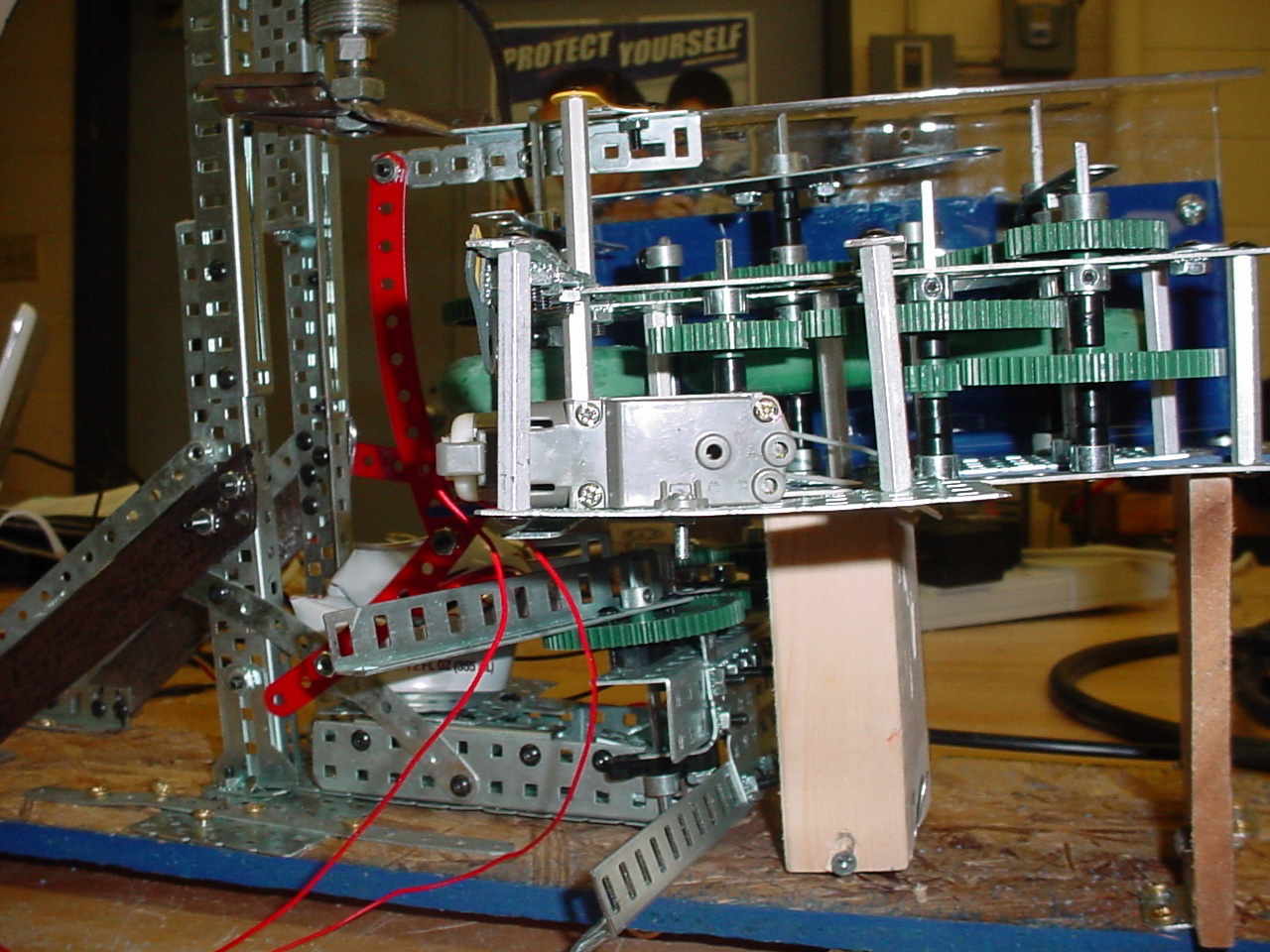
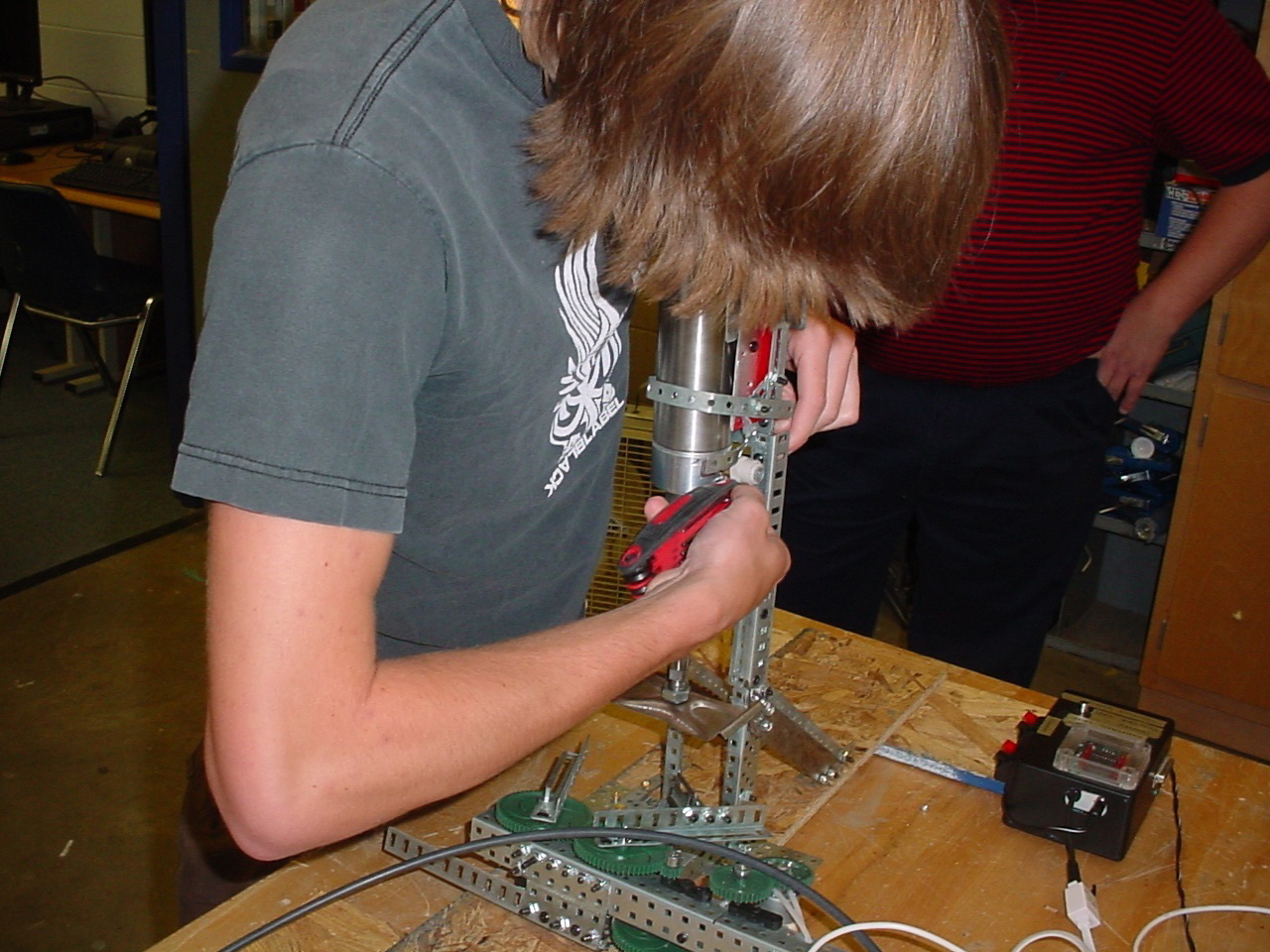
One group had to get several cans to move into position using gears to drive the cans along the track using Vex Robotics parts.

One of the groups spent time programming and developing software to control devices both with a TI-84 calculator and a computer.

The final group was responsible for making sure the can would be under the pneumatic cylinder when it falls down into the crushing area.

The pneumatic cylinder and electronic control valve were a special-order item from Craig's Robotics & Animatronics.

Once all of the components were put together, it took several hours to troubeshoot the mechanical issues and timings.
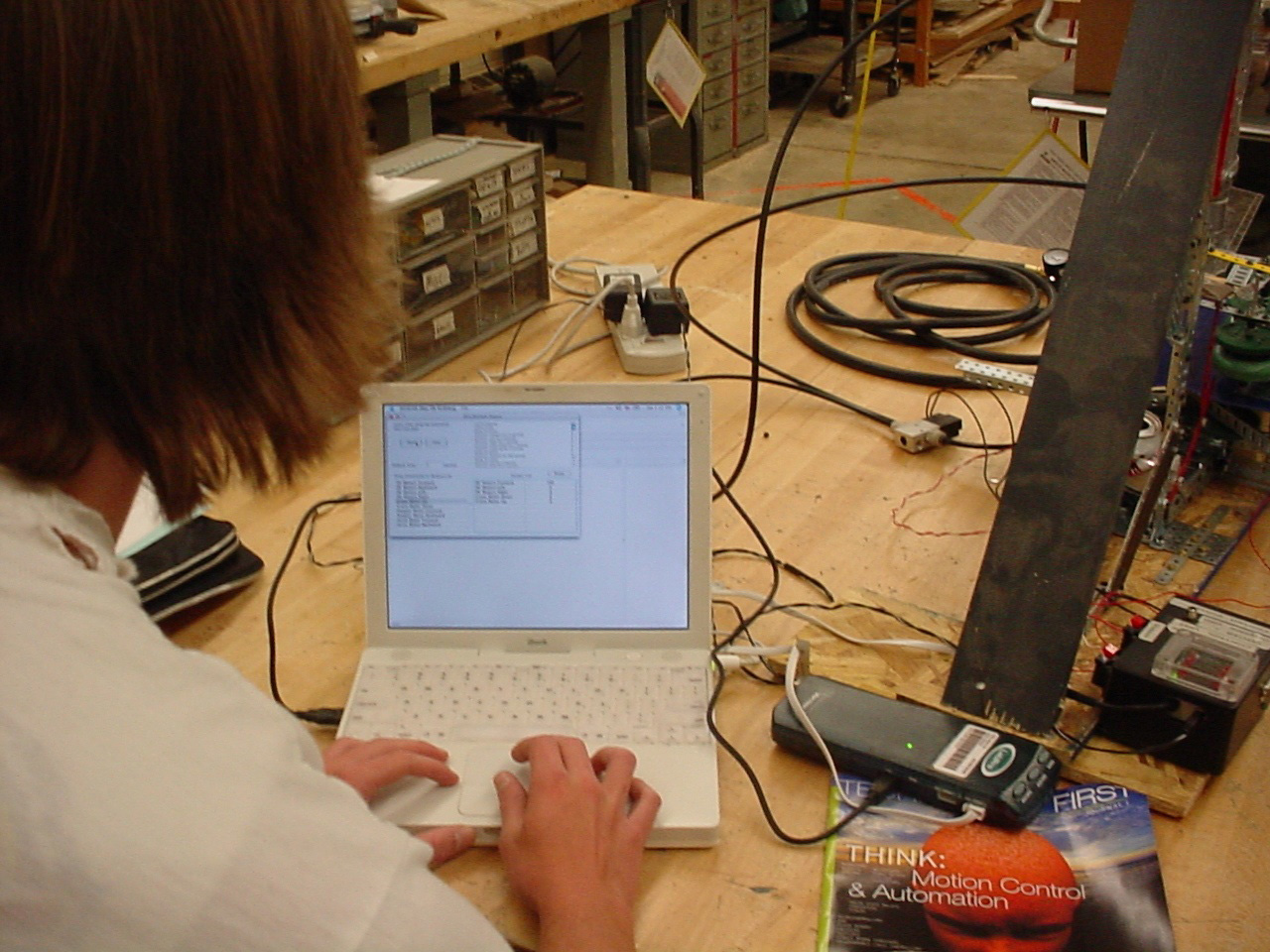
The students modified an existing DCU program that included a drag & drop interface to speed up the coding.

The final product takes about 3 minutes to cycle a single can through the device and to crush it.